Overview
Google Maps displays information about traffic conditions across an area. This package provides functions to produce georeferenced rasters from real-time Google Maps traffic information. Having Google traffic information in a georeferenced data format facilitates analysis of traffic information (e.g., spatially merging traffic information with other data sources).
This package was inspired by (1) existing research that has used Google traffic information, including in New York City and Dar es Salaam, and (2) similar algorithms implemented in JavaScript and in a C shell script.
The below image shows an example raster produced using the package showing traffic within Washington, DC.
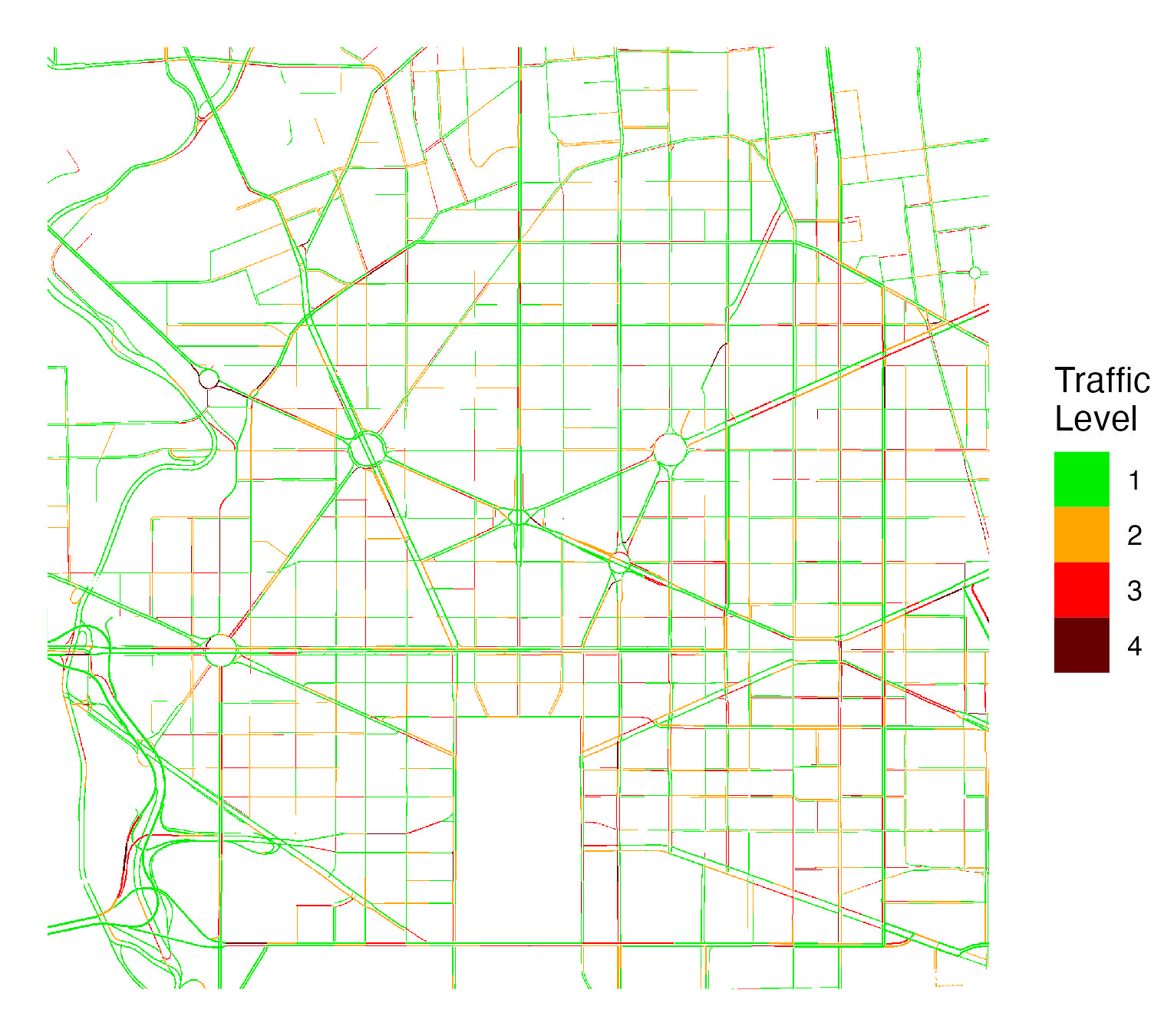
Pixel values in rasters are derived from Google traffic colors and can be one of four values:
| Google Traffic Color | Description | Raster Value |
|---|---|---|
| Green | No traffic delays | 1 |
| Orange | Medium traffic | 2 |
| Red | High traffic | 3 |
| Dark Red | Heavy traffic | 4 |
The package provides function to query Google traffic data around a location, within a polygon, or using a grid. The main functions are the following:
- gt_make_raster(): Create googe traffic raster around a point
- gt_make_raster_from_polygon(): Create googe traffic raster using a polygon
- gt_make_grid(): Create a grid (sf polygon) that defines locations to query traffic data
- gt_make_raster_from_grid(): Create googe traffic raster using a a grid
Google API Key
Querying Google traffic information requires a Google API key with the Maps Javascript API enabled. To create a Google API key, follow these instructions.
Setup
The below code should be run before running the following examples. We load packages, set the Google API key, and define a palette used for visualizing traffic data in leaflet.
## Load Google Traffic package
library(googletraffic)
## Load additional packages for working with and visualizing data
library(leaflet)
library(leaflet.providers)
library(raster)
library(dplyr)
## Set Google API Key
google_key <- "GOOGLE-API-KEY-HERE"
## Define Leaflet Palette and Legend
traffic_pal <- colorNumeric(c("green", "orange", "red", "#660000"),
1:4,
na.color = "transparent")Key parameters
The following are key parameters relevant across functions for querying Google Traffic data.
- zoom: The zoom level defines the resolution of the traffic image. Values can range from 0 to 20. At the equator, with a zoom level 10, each pixel will be about 150 meters; with a zoom level 20, each pixel will be about 0.15 meters. Consequently, smaller zoom levels can be used if only larger roads are of interest (e.g., highways), while larger zoom levels will be needed for capturing smaller roads.
-
height/width: The
heightandwidthparameters define the height and width of the raster in terms of pixels. The kilometer height/width of pixels depends primarily on the zoom level (larger zoom levels correspond to the pixels having a smaller kilometer distance).
Large height/width and delay time: Google traffic
data takes time to render on a map, and larger height and width values
require more time for data to render. The functions automatically scale
the delay time depending on the height and width values set, but the
delay time can also be manually set using the webshot_delay
parameter. Note that traffic data may fail to render for very large
height and width values, no matter the webshot_delay set
(we find that the function works well with a height and
width of 2000 or less).
Default height/width: In the
gt_make_raster_from_polygon() and
gt_make_grid() functions, height and
width do not need to be set. The function will first test a
height and width of 2000 for each API query to cover the region of
interest, but if a smaller height and width can be used where the same
number of API calls are made, a smaller height and width will be used.
However, the height and width can still be manually set in these
functions.
Raster Around Point
The gt_make_raster() function produces a raster, using a
centroid location and a height/width around the centroid to specify the
location to query traffic information. The below example queries traffic
for lower Manhattan, NYC.
## Make raster
r <- gt_make_raster(location = c(40.712778, -74.006111),
height = 1000,
width = 1000,
zoom = 16,
google_key = google_key)
## Map raster
leaflet(width = "100%") %>%
addProviderTiles("Esri.WorldGrayCanvas") %>%
addRasterImage(r, colors = traffic_pal, opacity = 1, method = "ngb") By using a smaller zoom, we can capture a larger area;
however, the pixels are more coarse.
## Make raster
r <- gt_make_raster(location = c(41.384900, -78.891302),
height = 1000,
width = 1000,
zoom = 7,
google_key = google_key)
## Map raster
leaflet(width = "100%") %>%
addProviderTiles("Esri.WorldGrayCanvas") %>%
addRasterImage(r, colors = traffic_pal, opacity = 1, method = "ngb") %>%
setView(lat = 41.384900, lng = -78.891302, zoom = 6) Raster Around Polygon
The above example shows querying traffic information for lower
Manhattan. In this example, we show querying traffic information for all
of Manhattan while still using a relatively high zoom level (that allows
capturing traffic on smaller streets). The
gt_make_raster_from_polygon() accepts a polygon as an
input; if needed, multiple API queries are made to query traffic for the
full polygon.
## Grab polygon of Manhattan
us_sp <- getData('GADM', country='USA', level=2)
ny_sp <- us_sp[us_sp$NAME_2 %in% "New York",]
## Make raster
r <- gt_make_raster_from_polygon(polygon = ny_sp,
zoom = 15,
google_key = google_key)
## Map raster
leaflet(width = "100%") %>%
addProviderTiles("Esri.WorldGrayCanvas") %>%
addRasterImage(r, colors = traffic_pal, opacity = 1, method = "ngb") Raster Using Grid
Within gt_make_raster_from_polygon(), the function
creates a grid that covers a polygon, creates a traffic raster for each
grid, and merges the rasters together. Some may prefer to first create
and see the grid, then create a traffic raster using this grid. For
example, one could (1) create a grid that covers a polygon then (2)
remove certain grid tiles that cover areas that may not be of interest.
The gt_make_grid() and
gt_make_raster_from_grid() functions facilitate this
process; gt_make_grid() creates a grid, then
gt_make_raster_from_grid() uses a grid as an input to
create a traffic raster.
First, we create a grid using gt_make_grid().
grid_df <- gt_make_grid(polygon = ny_sp,
zoom = 15)
leaflet(width = "100%") %>%
addTiles() %>%
addPolygons(data = grid_df, popup = ~as.character(id))We notice that the tile in the bottom left corner just covers water and some land outside of Manhattan. To reduce the number of API queries we need to make, we can remove this tile.
grid_clean_df <- grid_df[-5,]
leaflet(width = "100%") %>%
addTiles() %>%
addPolygons(data = grid_clean_df)Second, we use the grid to make a traffic raster using
gt_make_raster_from_grid().
## Make raster
r <- gt_make_raster_from_grid(grid_param_df = grid_clean_df,
google_key = google_key)
## Map raster
leaflet(width = "100%") %>%
addProviderTiles("Esri.WorldGrayCanvas") %>%
addRasterImage(r, colors = traffic_pal, opacity = 1, method = "ngb") Make PNG then Convert to Raster
To make a Google traffic raster, the functions first makes a temporary png file then converts the png file to a raster—where only the raster is outputted. Some workflows may want to separate the processes, where a PNG file would first be created, then the PNG file would be converted to a raster.
To support these workflows, the package provides the:
-
gt_make_png()function which creates a PNG file with traffic data -
gt_load_png_as_traffic_raster()function which converts a PNG file into a spatially-referenced traffic raster
The below example illustrates the process.
#### Make png
# The function does not output anything in R; it saves a png file, specified
# using the "out_filename" parameter
gt_make_png(location = c(40.712778, -74.006111),
height = 1000,
width = 1000,
zoom = 16,
out_filename = "google_traffic.png",
google_key = google_key)
#### Convert png to raster
# We now convert the "google_traffic.png" created above into a raster. Because
# the png is not spatially referenced, we need to enter the same location,
# height, width, and zoom parameters as were specified in gt_make_png()
r <- gt_load_png_as_traffic_raster(filename = "google_traffic.png",
location = c(40.712778, -74.006111),
height = 1000,
width = 1000,
zoom = 16)We can also use this process when querying traffic data for a larger study area that requires making multiple API calls. The below example illustrates creating multiple PNGs from a grid.
#### First, make grid
grid_df <- gt_make_grid(polygon = ny_sp,
height = 2000,
width = 2000,
zoom = 15)
print(grid_df)
#> Simple feature collection with 6 features and 6 fields
#> Geometry type: POLYGON
#> Dimension: XY
#> Bounding box: xmin: -74.10988 ymin: 40.68462 xmax: -73.85324 ymax: 40.87875
#> Geodetic CRS: WGS 84
#> longitude latitude id height width zoom geometry
#> 1 -73.98156 40.84630 1 2000 2000 15 POLYGON ((-74.02448 40.8138...
#> 2 -73.89616 40.84630 2 2000 2000 15 POLYGON ((-73.93907 40.8138...
#> 3 -73.98156 40.78173 3 2000 2000 15 POLYGON ((-74.02448 40.7492...
#> 4 -73.89616 40.78173 4 2000 2000 15 POLYGON ((-73.93907 40.7492...
#> 5 -74.06696 40.71715 5 2000 2000 15 POLYGON ((-74.10988 40.6846...
#> 6 -73.98156 40.71715 6 2000 2000 15 POLYGON ((-74.02448 40.6846...#### Make PNGs from grid
# Exports PNGs
for(i in 1:nrow(grid_df)){
grid_i_df <- grid_df[i,]
gt_make_png(location = c(grid_i_df$latitude, grid_i_df$longitude),
height = grid_i_df$height,
width = grid_i_df$width,
zoom = grid_i_df$zoom,
out_filename = paste0(i, "_google_traffic.png"),
google_key = google_key)
}
#### Convert PNGs to rasters
# Here we make a list of rasters
r_list <- lapply(1 in 1:nrow(grid_df)){
grid_i_df <- grid_df[i,]
gt_load_png_as_traffic_raster(filename = paste0(i, "_google_traffic.png"),
location = c(grid_i_df$latitude,
grid_i_df$longitude),
height = grid_i_df$height,
width = grid_i_df$width,
zoom = grid_i_df$zoom)
}
#### Mosaic rasters together
# To mosaic the rasters together, the mosaic() function from the raster package
# requires that rasters have the same origin and resolution. The above rasters
# will not have the same orgin, and the resolutions will be slightly different.
# The gt_mosaic() function allows mosaicing rasters with different origins and
# resolutions.
r <- gt_mosaic(r_list)Alternatives to Google Maps traffic information
Google Maps is one of many sources that shows traffic information.
One alternative source is Mapbox, which provides vector
tilesets that—similar to Google—show four levels of live traffic.
The mapboxapi
package provides a convenient way to obtain traffic information from
Mapbox as sf polylines using the get_vector_tiles
function. The function requires a Mapbox API key, which can be obtained
here.
They key differences between traffic information from the
mapboxapi and googletraffic packages are
that:
-
googletrafficprovides data in raster format, whilemapboxapiprovides data as polylines - To cover traffic over large areas,
googletrafficcan require significantly less API calls compared tomapboxapi
Below is an example querying traffic information from Mapbox:
## Setup
library(mapboxapi)
library(dplyr)
library(leaflet)
library(sf)
## Set API key
mapbox_key <- "MAPBOX-KEY-HERE"
## Make leaflet palette
mapbox_pal <- colorFactor(c("green", "orange", "red", "#660000"),
c("low", "moderate", "heavy", "severe"),
ordered = T)
## Query Data
nyc_cong_point <- get_vector_tiles(
tileset_id = "mapbox.mapbox-traffic-v1",
location = c(-74.006111, 40.712778), # c(longitude, latitude)
zoom = 14,
access_token = mapbox_key
)$traffic$lines
## Plot Data
leaflet(width = "100%") %>%
addProviderTiles("Esri.WorldGrayCanvas") %>%
addPolylines(data = nyc_cong_point,
color = ~mapbox_pal(congestion),
opacity = 1,
weight = 2) %>%
setView(lat = 40.705, lng = -74.01, zoom = 14)
## View dataset
print(head(nyc_cong_point))
#> Simple feature collection with 6 features and 3 fields
#> Geometry type: MULTILINESTRING
#> Dimension: XY
#> Bounding box: xmin: -74.01827 ymin: 40.70112 xmax: -74.00348 ymax: 40.71428
#> Geodetic CRS: WGS 84
#> class structure congestion geometry
#> 1 service <NA> low MULTILINESTRING ((-74.00832...
#> 2 service <NA> moderate MULTILINESTRING ((-74.01744...
#> 3 street <NA> low MULTILINESTRING ((-74.0152 ...
#> 4 street <NA> moderate MULTILINESTRING ((-74.00382...
#> 5 street <NA> heavy MULTILINESTRING ((-74.00348...
#> 6 street <NA> severe MULTILINESTRING ((-74.00767...Like gt_make_raster(), get_vector_tiles
uses a latitude, longitude, and zoom level as input.
get_vector_tiles does not have parameters to define the
number of pixels the map covers. However, get_vector_tiles
also accepts an sf polygon, where multiple queries are made
to cover the bounding box of the polygon.
The below example shows querying data for all of Manhattan. One key
difference between using Mapbox and Google Maps is that
get_vector_tiles requires 66 queries to cover the full
area, while gt_make_raster_from_polygon requires 5
queries.
## Grab shapefile of Manhattan
us_sp <- getData('GADM', country='USA', level=2)
ny_sp <- us_sp[us_sp$NAME_2 %in% "New York",]
ny_sf <- ny_sp %>% st_as_sf()
## Query Data
nyc_cong_point <- get_vector_tiles(
tileset_id = "mapbox.mapbox-traffic-v1",
location = c(-74.006111, 40.712778), # c(longitude, latitude)
zoom = 14,
access_token = mapbox_key
)$traffic$lines
#### Plot Data
leaflet(width = "100%") %>%
addProviderTiles("Esri.WorldGrayCanvas") %>%
addPolylines(data = nyc_cong_polygon,
color = ~mapbox_pal(congestion),
opacity = 1,
weight = 1) %>%
setView(lat = 40.7773729, lng = -73.968252, zoom = 12) In addition to providing vector-based data on traffic levels, Mapbox also provides information on typical and live traffic speeds. However, obtaining speed information requires Mapbox Enterprise access.